Brain-Computer Interfaces
Restoration of arm and hand control is consistently the most sought after quality of life improvement requested by patients with spinal cord injury. Although brain-computer interfaces for movement have been increasingly successful, BCIs for fast and accurate grasp control have been limited by a lack of methods designed for the complexity of grasping. We are working to develop new algorithms for training BCIs to allow non-human primates and eventually humans to perform reaching and grasping with speed and accuracy. The next step of this work will interface neural signals with skilled artificial systems using a ‘shared control’ approach to allow subjects to act with dexterity in complex simulated and real world environments. These new models will also make real-time predictions about how neural networks coordinate during complex movements, allowing us to causally disambiguate between competing models and make progress in our fundamental understanding of motor control.
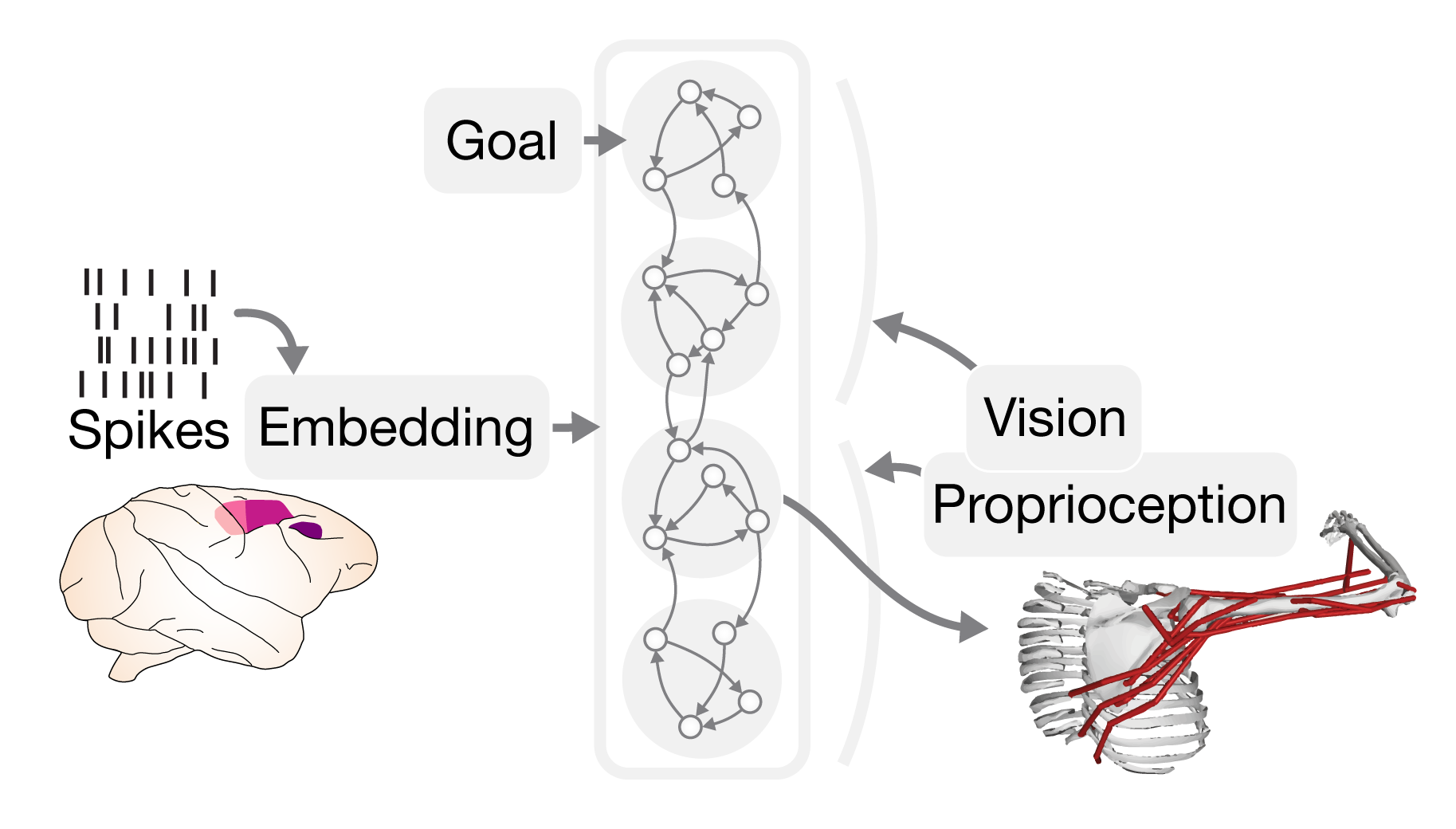
Designing BCIs to understand reach and grasp control
Monkey controlling grasping BCI in virtual reality (related paper)